Publications
-
Botany Meets Robotics in Alpine Screes Monitoring
D De Benedittis, …, M GarabiniIEEE Transactions on Field Robotics —Autonomous monitoring framework for alpine screes using a quadrupedal robot equipped with cameras.
Citation
@article{debenedittis2025botany, author={De Benedittis, Davide and Di Lorenzo, Giovanni and Angelini, Franco and Valle, Barbara and Borgatti, Marina Serena and Remagnino, Paolo and Caccianiga, Marco and Garabini, Manolo}, journal={IEEE Transactions on Field Robotics}, title={Botany Meets Robotics in Alpine Scree Monitoring}, year={2025}, volume={}, number={}, pages={1-1}, doi={10.1109/TFR.2025.3632773}} -
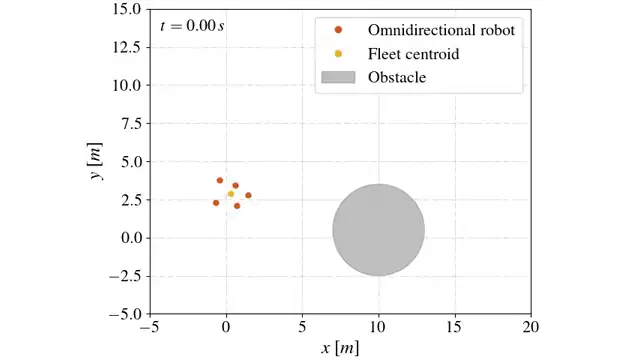
Managing Conflicting Tasks in Heterogeneous Multi-Robot Systems Through Hierarchical Optimization
D De Benedittis, M Garabini, L PallottinoIEEE Robotics and Automation Letters —Leverage hierarchical optimization (or hierarchical quadratic programming) for multi-robot coordination and guaranteed prioritized task execution.
Citation
@article{debenedittis2025managing, author={De Benedittis, Davide and Garabini, Manolo and Pallottino, Lucia}, journal={IEEE Robotics and Automation Letters}, title={Managing Conflicting Tasks in Heterogeneous Multi-Robot Systems Through Hierarchical Optimization}, year={2025}, volume={10}, number={6}, pages={5305-5312}, doi={10.1109/LRA.2025.3559843}} -
Soft Bilinear Inverted Pendulum: a Model to Enable Locomotion with Soft Contacts
D De Benedittis, F Angelini, M GarabiniIEEE Transactions on Systems, Man, and Cybernetics: Systems —Model-based two-control-blocks architecture (motion planner and tracking controller) for quadrupedal locomotion in the presence of soft contacts.
Citation
@article{debenedittis2025soft, author={De Benedittis, Davide and Angelini, Franco and Garabini, Manolo}, journal={IEEE Transactions on Systems, Man, and Cybernetics: Systems}, title={Soft Bilinear Inverted Pendulum: A Model to Enable Locomotion With Soft Contacts}, year={2025}, volume={55}, number={2}, pages={1478-1491}, doi={10.1109/TSMC.2024.3504342}} -
Articulated Soft Robots: A Feasibility Driven Control Approach
D De Benedittis, …, M GarabiniItalian Conference on Robotics and Intelligent Machines —Efficient DDP-based trajectory optimization of articulated soft robots.
Citation
@article{de_benedittis2024articulated, author={De Benedittis, Davide and Chhatoi, Saroj Prasad and Pierallini, Michele and Angelini, Franco and Mastalli, Carlos and Garabini, Manolo}, journal={Sixth Italian Conference on Robotics and Intelligent Machines}, title={Articulated Soft Robots: A Feasibility Driven Control Approach}, month=oct, year=2024, publisher={Zenodo}, doi={10.5281/zenodo.14731033}, url={https://doi.org/10.5281/zenodo.14731033}}


Other Publications
Robotic Monitoring of European Habitats: a Labeled Dataset for Plant Detection in Annex I Habitats of Italy
G Di Lorenzo, F Angelini, M Pierallini, S Tolomei, D De Benedittis, …, M Garabini Scientific Data —
Citation
@article{dilorenzo2025robotic,
author={Di Lorenzo, Giovanni and Angelini, Franco and Pierallini, Michele and Tolomei, Simone and De Benedittis, Davide and Denaro, Agnese and Rivieccio, Giovanni and Caria, Maria Carmela and Bonini, Federica and Grassi, Anna and de Simone, Leopoldo and Fanfarillo, Emanuele and Fiaschi, Tiberio and Maccherini, Simona and Valle, Barbara and Borgatti, Marina Serena and Bagella, Simonetta and Gigante, Daniela and Angiolini, Claudia and Caccianiga, Marco and Garabini, Manolo},
journal={Scientific Data},
title={Robotic monitoring of European habitats: a labeled dataset for plant detection in Annex I habitats of Italy},
year={2025},
volume={12},
number={1},
pages={822},
doi={10.1038/s41597-025-05182-7}} A Reproducible Benchmarking Methodology to Assess Robotic Locomotion Over Irregular Terrains: A Practical and Scalable Approach
D Rodriguez-Cianca, P Sendin, G Alfonso, D De Benedittis, …, D Torricelli IEEE Robotics & Automation Magazine —
Citation
@article{rodriguezcianca2025reproducible,
author={Rodriguez-Cianca, David and Sendin, Paulino and Alfonso, Giuseppe and De Benedittis, Davide and Tolomei, Simone and Angelini, Franco and Garabini, Manolo and Torricelli, Diego},
journal={IEEE Robotics \& Automation Magazine},
title={A Reproducible Benchmarking Methodology to Assess Robotic Locomotion Over Irregular Terrains: A Practical and Scalable Approach},
year={2025},
volume={},
number={},
pages={2-12},
doi={10.1109/MRA.2025.3631570}}