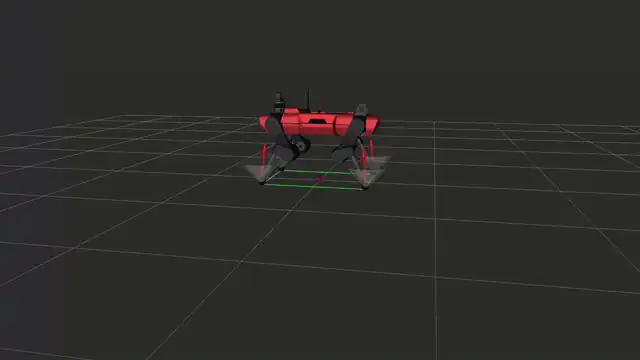
Model-based control for quadrupedal robots moving on compliant terrains.
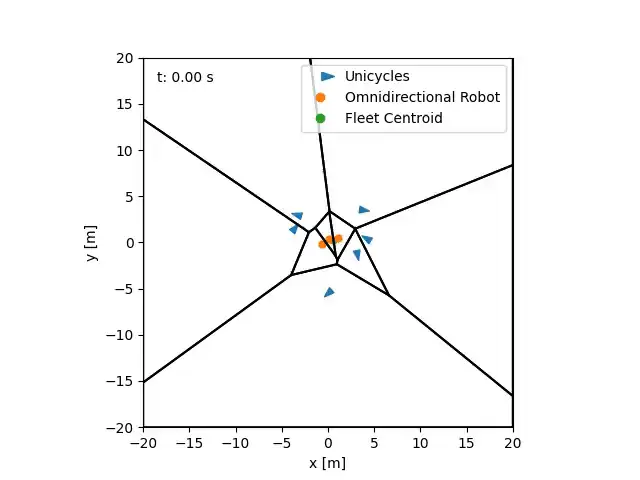
Control of heterogeneous multi-robot fleet using hierarchical optimization and quadratic programming.
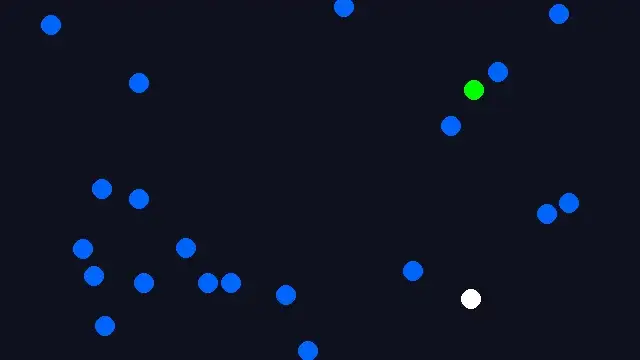
Control of multi-robot systems using reinforcement learning and JAX.
Docker container to be used with ROS 1 or ROS 2. Supports the usage of GUIs and NVIDIA GPUs.
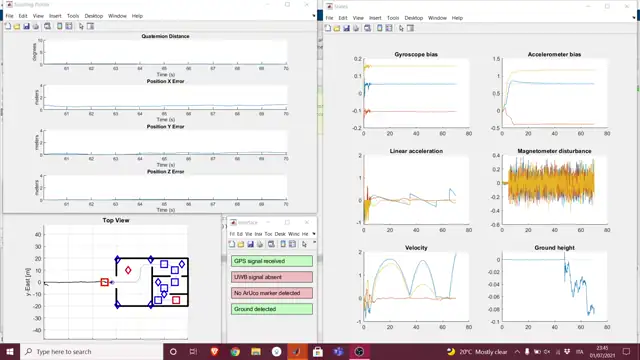
Indirect Extended Sequential Kalman Filter for multi sensor fusion on UAVs.